Xue Yang, Luliang Tang, Kathleen Stewart, Zhen Dong, Xia Zhang and Qingquan Li
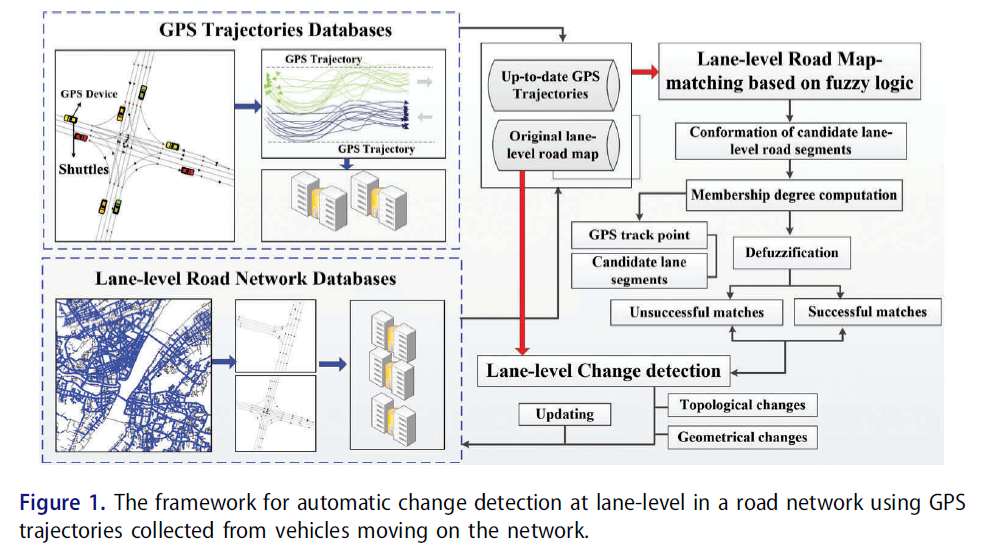
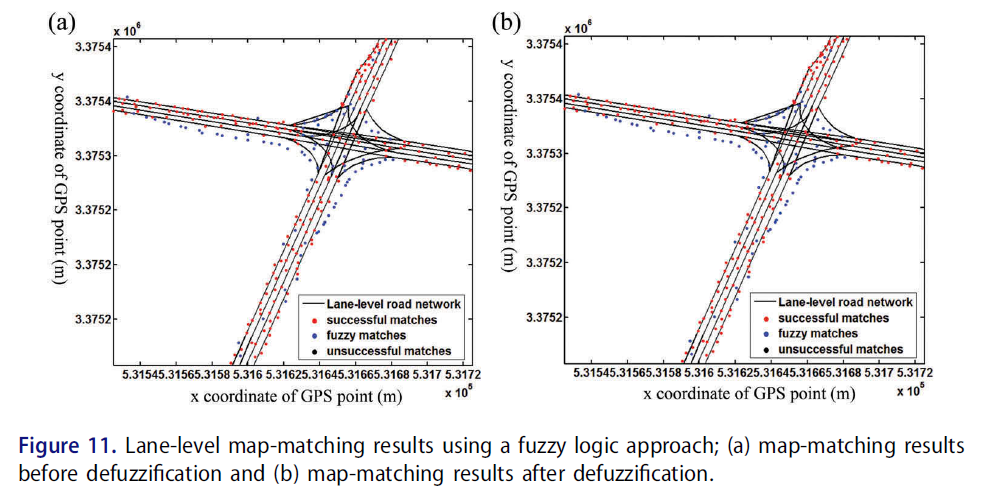
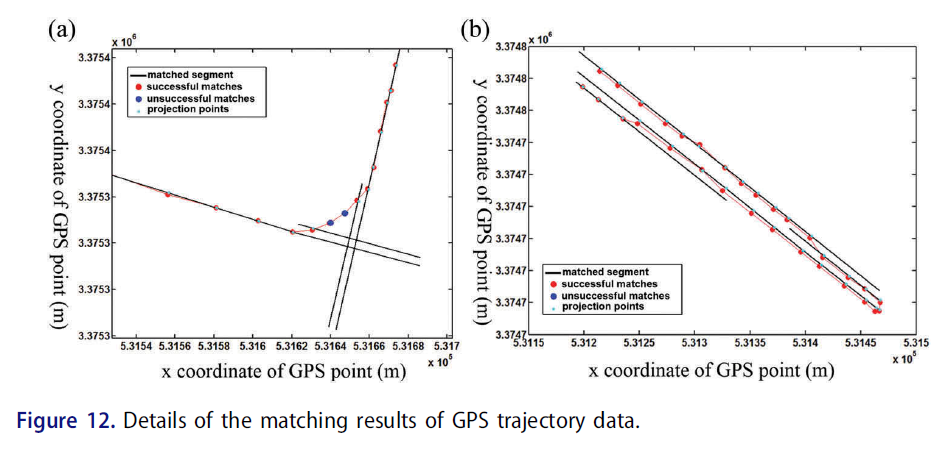
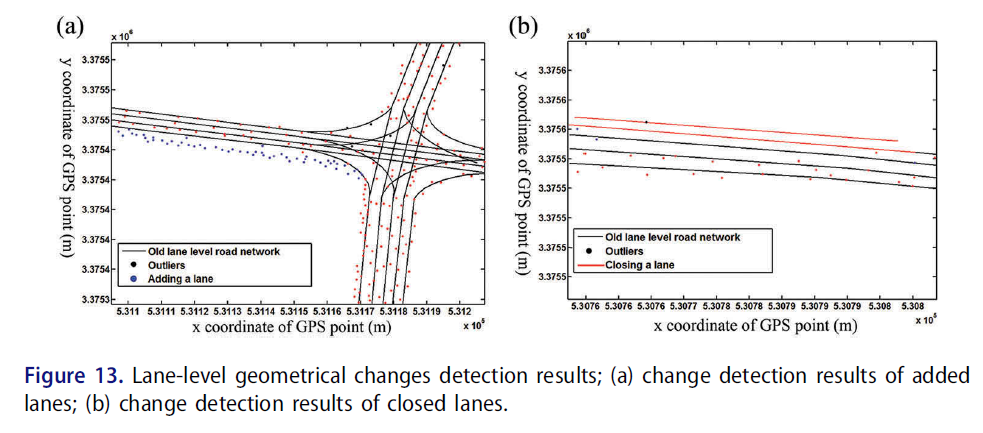
Abstract:Lane-level road network updating is crucial for urban traffic applications that use geographic information systems contributing to, for example, intelligent driving, route planning and traffic control. Researchers have developed various algorithms to update road networks using sensor data, such as high-definition images or GPS data; however, approaches that involve change detection for road networks at lane level using GPS data are less common. This paper presents a novel method for automatic change detection of lanelevel road networks based on GPS trajectories of vehicles. The proposed method includes two steps: map matching at lane level and lane-level change recognition. To integrate the most up-to-date GPS data with a lane-level road network, this research uses a fuzzy logic road network matching method. The proposed map-matching method starts with a confirmation of candidate lane-level road segments that use error ellipses derived from the GPS data, and then computes the membership degree between GPS data and candidate lane-level segments. The GPS trajectory data is classified into successful or unsuccessful matches using a set of defuzzification rules. Any topological and geometrical changes to road networks are detected by analysing the two kinds of matching results and comparing their relationships with the original road network. Change detection results for road networks in Wuhan, China using collected GPS trajectories show that these methods can be successfully applied to detect lane-level road changes including added lanes, closed lanes and lane-changing and turning rules, while achieving a robust detection precision
of above 80%.
Keywords:Lane-level road network; change detection; road network matching; GPS trajectory data; autonomous driving

Download