Bisheng Yang , Yuan Liu , Zhen Dong , Fuxun Liang , Bijun Li , Xiangyang Peng
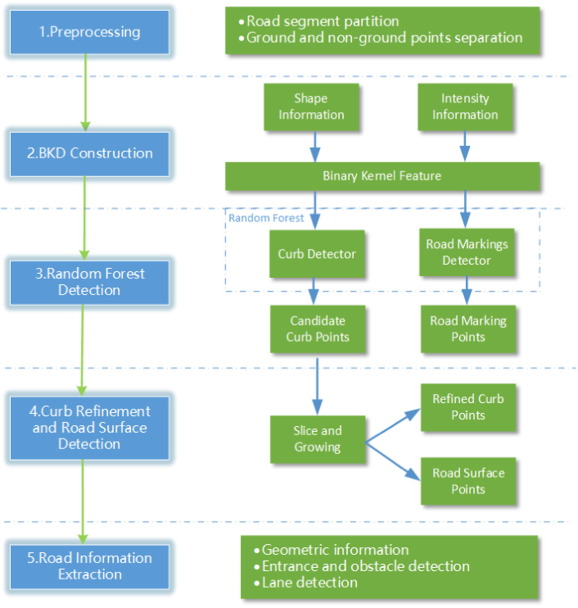
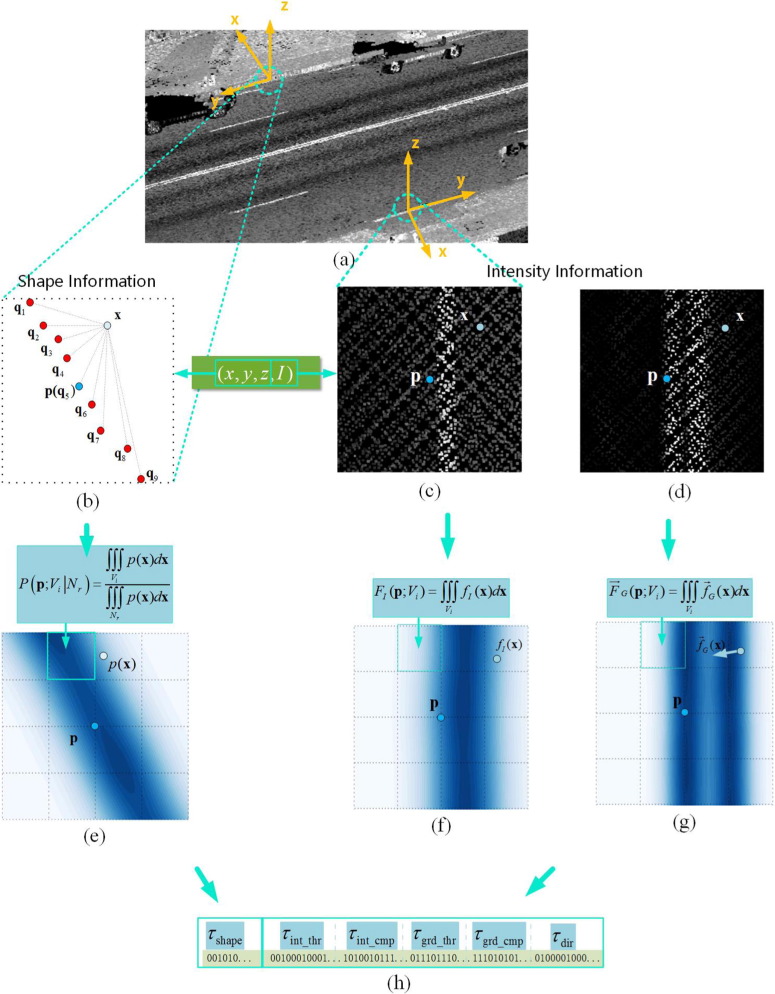
Abstract:Extracting road information from point clouds obtained through mobile laser scanning (MLS) is essential for autonomous vehicle navigation, and has hence garnered a growing amount of research interest in recent years. However, the performance of such systems is seriously affected due to varying point density and noise. This paper proposes a novel three-dimensional (3D) local feature called the binary kernel descriptor (BKD) to extract road information from MLS point clouds. The BKD consists of Gaussian kernel density estimation and binarization components to encode the shape and intensity information of the 3D point clouds that are fed to a random forest classifier to extract curbs and markings on the road. These are then used to derive road information, such as the number of lanes, the lane width, and intersections. In experiments, the precision and recall of the proposed feature for the detection of curbs and road markings on an urban dataset and a highway dataset were as high as 90%, thus showing that the BKD is accurate and robust against varying point density and noise.
Keywords:
Point cloud processing;
Feature extraction;
Road marking;
Curb
Detection

Download