Jianping Li, Bisheng Yang, Chi Chen, Ronggang Huang, Zhen Dong, Wen Xiao
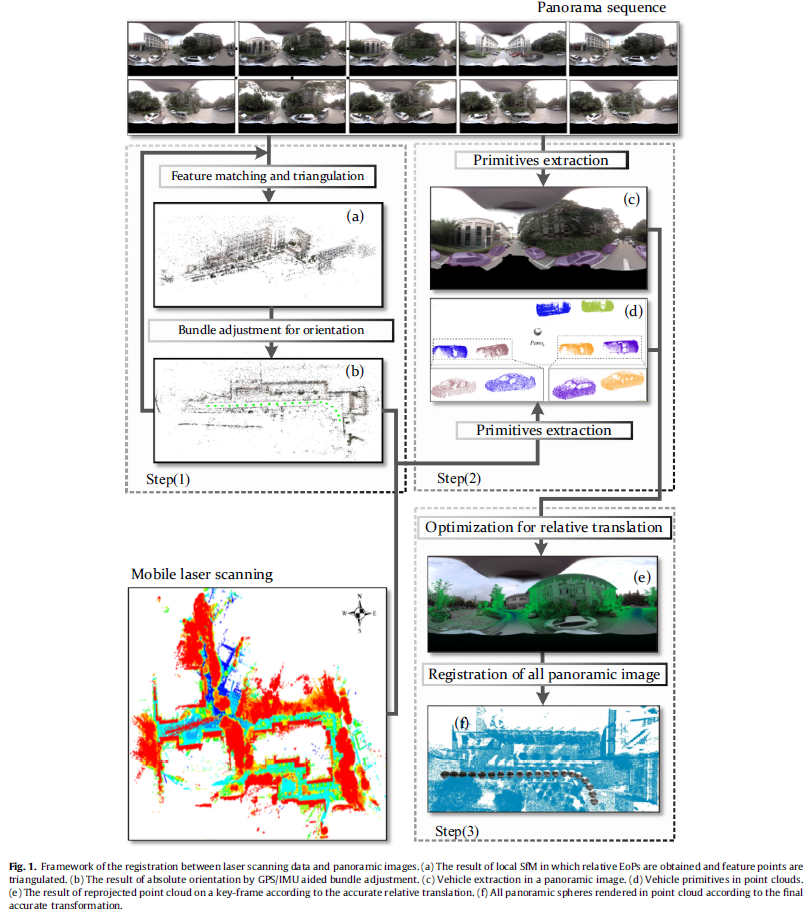
Abstract:Inaccurate exterior orientation parameters (EoPs) between sensors obtained by pre-calibration leads to failure of registration between panoramic image sequence and mobile laser scanning data. To address this challenge, this paper proposes an automatic registration method based on semantic features extracted from panoramic images and point clouds. Firstly, accurate rotation parameters between the panoramic camera and the laser scanner are estimated using GPS and IMU aided structure from motion (SfM). The initial EoPs of panoramic images are obtained at the same time. Secondly, vehicles in panoramic images are extracted by the Faster-RCNN as candidate primitives to be matched with potential corresponding primitives in point clouds according to the initial EoPs. Finally, translation between the panoramic camera and the laser scanner is refined by maximizing the overlapping area of corresponding primitive pairs based on the Particle Swarm Optimization (PSO), resulting in a finer registration between panoramic image sequences and point clouds. Two challenging urban scenes were experimented to assess the proposed method, and the final registration errors of these two scenes were both less than three pixels, which demonstrates a high level of automation, robustness and accuracy.
Keywords: Panoramic image sequence;Mobile laser scanning data;Semantic features;Registration

Download