Zhen Dong , Bisheng Yang , Yuan Liu , Fuxun Liang , Bijun Li , Yufu Zang
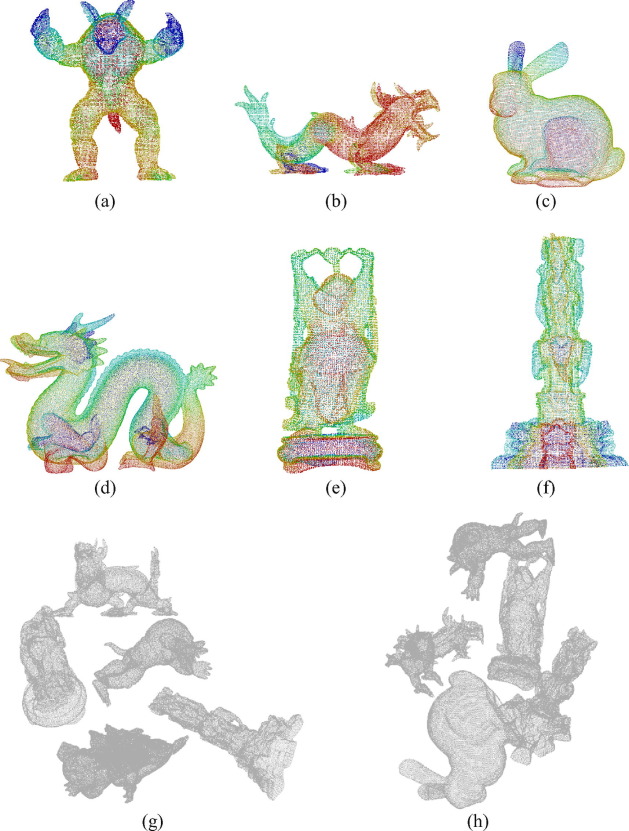
Abstract:3D local surface description is now at the core of many computer vision technologies, such as 3D object recognition, intelligent driving, and 3D model reconstruction. However, most of the existing 3D feature descriptors still suffer from low descriptiveness, weak robustness, and inefficiency in both time and memory. To overcome these challenges, this paper presents a robust and descriptive 3D Binary Shape Context (BSC) descriptor with high efficiency in both time and memory. First, a novel BSC descriptor is generated for 3D local surface description, and the performance of the BSC descriptor under different settings of its parameters is analyzed. Next, the descriptiveness, robustness, and efficiency in both time and memory of the BSC descriptor are evaluated and compared to those of several state-of-the-art 3D feature descriptors. Finally, the performance of the BSC descriptor for 3D object recognition is also evaluated on a number of popular benchmark datasets, and an urban-scene dataset is collected by a terrestrial laser scanner system. Comprehensive experiments demonstrate that the proposed BSC descriptor obtained high descriptiveness, strong robustness, and high efficiency in both time and memory and achieved high recognition rates of 94.8%, 94.1% and 82.1% on the considered UWA, Queen, and WHU datasets, respectively.
Keywords:
Binary shape context;
Local feature descriptor ;
Gaussian kernel density estimation;
3D object recognition


Download