标题:道路边界自动化三维提取及矢量化
Automated 3D road boundary extraction and vectorization using MLS point clouds
来源:IEEE Transactions on Intelligent Transportation Systems
作者:米晓新,杨必胜,董震,陈驰,顾建祥
1概述
高精度道路及相关的几何参数信息在道路资产管理、智能交通系统、道路安全评估、高精度地图生产及新型基础测绘中具有重要需求及意义。车载激光扫描系统可以快速获取道路及其两侧地物表面高精度位置和属性信息,为精确提取道路边界等道路要素提供了一种重要的数据源。本文提出了一种从车载激光点云中快速提取及矢量化道路边界的方法。该方法首先基于一种针对道路边界结构的超体素生成方法,高效地将无序地面点云分割为具有良好语义边界的超体素;然后识别并聚类出初始待选道路边界;最后,通过拟合、跟踪和补全得到连续、平滑的矢量化道路边界;基于此,道路宽度、坡度、超高、转弯半径等几何参数可被精确计算。大范围实验表明,本文提出的算法可快速、高效、准确地提取及矢量化道路边界,并有效补全由于遮挡等导致的缺失的道路边界,最终精度优于95.0%,召回优于91.0%。
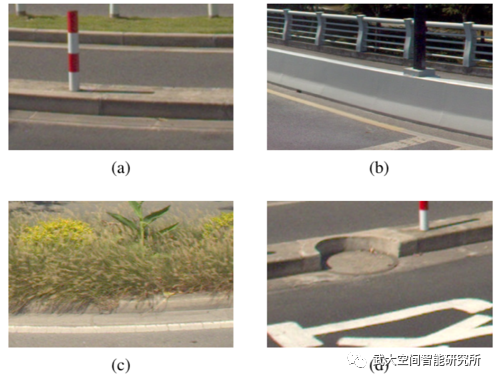
图1 城市场景中的几种道路边界
2方法
该方法主要包括道路边界提取及矢量化两个部分,整体流程如图2所示。首先,通过对地面点云生成的路坎超体素聚类,获得初始道路边界点云;然后,通过卡尔曼滤波跟踪经贝塞尔曲线拟合后的初始道路边界,并补全缺失部分,生成补全后的矢量化道路边界。
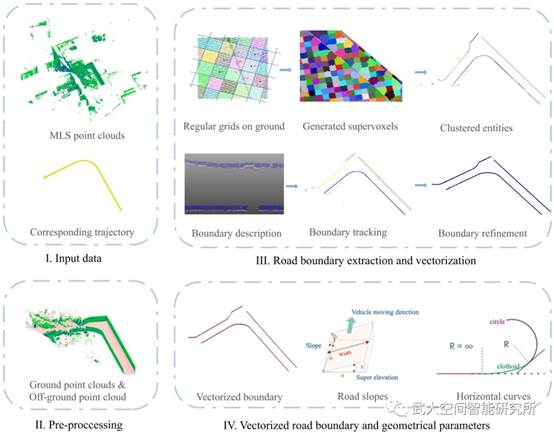
图2 道路边界提取及矢量化整体流程图
2.1道路边界提取
本文针对于道路边界提取任务,提出了一种快速超体素生成方法:首先将地面点云划分为均匀格网,然后重新分配点高程差异较大的格网中的点,依此生成具有良好语义边界的超体素。超体素生成过程如图3所示。通过收缩距离聚类重新分配点之后的高程差异较大的超体素,提取出初始待选道路边界。
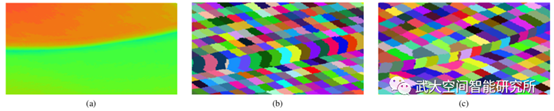
图3 超体素生成过程:(a)高程渲染下的地面点云;(b)地面均匀格网;(c)具有良好语义边界的地面超体素
2.2道路边界矢量化
基于提取出的初始道路边界,本文经过贝塞尔曲线拟合、卡尔曼滤波跟踪、缺失部分补全、错误滤除步骤得到补全后的矢量化道路边界。道路边界矢量化过程如图4所示。

图4 道路边界矢量化:(a)初始待选道路边界点云;(b)拟合后的道路边界;(c)补全后的矢量化道路边界
3 实验
本文通过2个数据集:园区场景数据集(张江数据集)及城区场景数据集(陆家嘴数据集)测试该方法的有效性。张江数据集的道路边界矢量化结果如图5所示,陆家嘴数据集的道路边界矢量化结果如图6所示。道路边界的补全效果如图7所示。

图5 矢量化道路边界结果(张江数据集):红色曲线为矢量化后的道路边界,绿色为道路场景点云
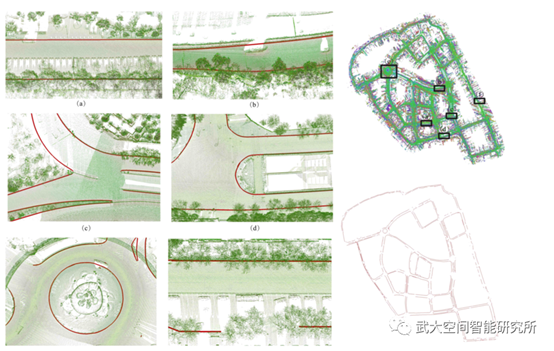
图6 矢量化道路边界结果(陆家嘴数据集):红色曲线为矢量化后的道路边界,绿色为道路场景点云
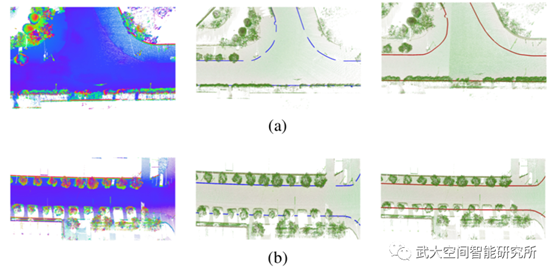
图7 道路边界补全:第一列为原始道路场景点云;第二列为提取出的道路边界(蓝色)在场景中叠加显示;第三列为补全后的矢量化道路边界(红色)在场景中叠加显示
点击获取原文