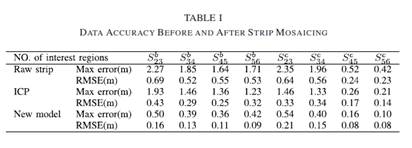
结果分析:
对实测的机载雷达测深数据进行条带拼接处理结果如下,在area B和area C中条带重叠区共选取了8个半径为10m的圆形区域,以最小二乘拟合面为真值计算计算最大误差和MRES,统计结果如表所示。8个感兴趣区域的RMSE为0.12 m,最大误差为0.36 m,优于ICP模型的RMSE为0.28 m和最大误差1.1 m。

图3 条带拼接模型处理前后效果。(a)是原始测深条带,(b)是条带拼接模型处理后结果。(c)和(d)分别为area A条带拼接前后地形,(e),(f),(g)分别对应area C内原始数据,ICP模型和文中模型处理后地形,(h),(i),(j)分别对应area C内原始数据,ICP模型和文中模型处理后地形。
Abstract:The airborne light detection and ranging (LiDAR) bathymetry (ALB) system is an extension of the ubiquitous topographic LiDAR mapping system and has been most simply characterized as adding a green laser to the infrared laser of topo systems. Due to the low point cloud density and monotonous objects in the scene, it is difficult to mosaicing the ALB strips. Therefore, the existing airborne laser scanning strip stitching algorithm has poor performance for ALB strips. In this article, a coarse-to-fine strip mosaicing model for ALB is proposed. The framework is fast and efficient and can handle large ALB data. An improved alpha shapes algorithm can fast and accurately determine the overlap region of strip is applied. Due to different data accuracy and spatial characteristics, the water area and land area are processed separately. A weight distribution-based coarse to fine registration model is designed for underwater areas. The topological constraint term is added to the nonrigid iterative closest point (ICP) cost function to prevent excessive deformation caused by outliers. The implicit B-spline surface fitting algorithm using the 3L algorithm and the least-squares trend surface fitting algorithm are applied separately to assign weights for overlapping strips to solve the limitation of no control or less control. Moreover, a random sample consensus (RANSAC)-ICP registration model characterized by the normal vector and curvature is constructed for land area. Finally, the comparisons with ICP highlight the superiority of the proposed approach in flexibility and accuracy. The root-mean-square error (RMSE) is 0.12 m and the maximum error is 0.36 m.
点击获取原文