标题:车载探地雷达地下目标实时探测法
作者:杨必胜,宗泽亮,陈驰,孙文鹿, 米晓新, 吴唯同,黄荣刚
关键词:探地雷达 地下目标探测 卷积神经网络 深度学习 城市空间安全
全文概述
本文提出一种车载探地雷达城市道路地下多目标实时探测方法,分析并确定了GPR影像中7类可识别的城市道路地下空间典型目标(即:雨水井,电缆,稀疏、密集钢筋网,金属、非金属管,空洞),并根据其反射信号特征,创建了典型城市道路GPR地下目标样本库。通过迁移学习的方法,使用扩容后的数据精调已在ImageNet等[18-20]大型数据集上训练后的预训练权重,实现端到端的实时精确检测。
1 基于深度学习的GPR图像地下目标探测

图 1 卷积神经网络GPR图像地下目标检测框架
Fig. 1 Target detection from GPR imagery based on convolutional neural network
(1) 构建地下目标样本数据集。主要通过人机交互的方式完成地下目标样本标注并进行数据增容,完成地下目标标准数据集的构建。
(2) 采用联合训练机制训练卷积神经网络,联合ImageNet数据集、COCO数据集、PASCAL VOC数据集训练Darknet-53[21]卷积神经网络,获得预训练神经元参数集合。
(3) 训练与推想(Inference)卷积神经网路。采用迁移学习方法,先冻结网络前50层参数集,使用GPR标注数据集训练网。
(4) 网络精调(Fine-tune)51—53层网络权重参数,获得GPR图像地下目标提取卷积神经网络第一阶段参数集,后解冻前50层参数集进行全层训练,训练出可以实时预测多个边界框位置及多个类别的模型。最后载入网络训练后的模型,进行前向传播,推想获得测试数据集中地下目标的位置与类别信息。
1.1 构建地下目标训练数据集
针对城市地下空间的几类典型目标(如雨水井、电缆等)训练样本数量不足的问题,本文基于实测的车载GPR图像,利用albumentations[22]库增加实测GPR图像的样本,同时顾及GPR图像的分辨率和地下目标的特征,对GPR图像进行增强、随机裁剪、小角度旋转、模糊化和镜像翻转等处理,从而获得足够的样本对卷积神经网络进行训练。表 1为城市地下空间7类典型目标波形特征表。样本标注过程以表中列举的波形特征作为依据。
表 1 地下空间7类典型目标波形特征表
Tab. 1 Seven types of typical target waveform characteristics table in underground space
样本 |
类别 |
特征 |

|
雨水井 |
自顶而下,波形杂乱,黑白相间,与周围波形比较具有突变性 |
|
稀疏钢筋网 |
有黑白相间同相轴,抛物线状,反射强度弱于金属管,成群离散分布 |
|
密集钢筋网 |
黑白相间条状,存在密集波形条纹,反射强度弱于金属管和空洞,连续条状分布 |
|
空洞 |
黑白相间的干涉条纹,与周围波形比较具有突变性,较为平滑且模糊 |
|
金属管 |
抛物线顶部为管线位置,可以清楚看到白色、黑色、白色相间,单曲线回波特征明显 |
|
非金属管 |
抛物线顶部为管线位置,可以清楚看到白色、黑色、白色相间,双曲线回波特征明显 |
|
电缆 |
自上而下,一系列非常明显且有规律的抛物线形多次回波特征明显 |
1.2 地下目标检测骨干网络
Darknet-53兼顾网络复杂度与检测准确率,与常用的目标检测特征提取网络VGG-16[23-24]相比不仅运算量更少、模型更轻量且有更强的特征提取能力。图 2展示了Darknet-53的结构。它由连续的3×3和1×1卷积核组成,在充分提取图片特征的情况下减少了网络参数量。借鉴Resnet思想加入残差(Res)块以解决网络因层数较深而导致的梯度弥散或者梯度爆炸的现象[23],将传统深层神经网络的逐层训练调整为逐阶段训练。除此以外,各卷积层后都接有Batch_Normalize(BN)层[25]和LeakyReLU层[26],简化计算量的同时加速收敛,并且防止模型过拟合。
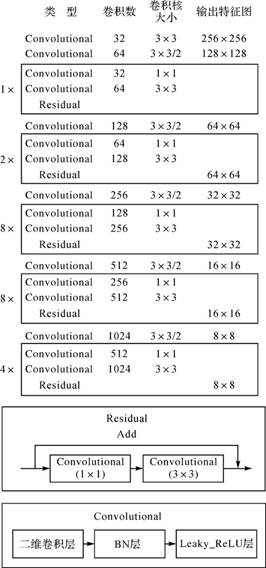
图 2 Darknet-53网络结构
Fig. 2 Darknet-53 network
1.3 神经网络训练与推想
本文的网络训练方法遵循YOLO v3[21]提出的网络训练方法,网络使用由k均值聚类得到的锚框(anchor box)来辅助预测边界框,并且训练逻辑回归分类器预测每个边界框的对象分数。每个框可以预测边界框包含的多个类别。神经网络直接对GPR图像进行卷积后形成特征图,并对特征图逐格预测地下目标位置和概率。算法核心在于将地下目标检测问题转化为回归问题,实现了端到端(end to end)的检测。
2 GPR图像地下目标探测试验与分析
为验证本文方法的有效性,分别利用SIR-30车载GPR系统采集的深圳市彩田路中往返两条路线的GPR数据进行试验验证(图 4)。GPR采集原理如图 5(a)所示,本次试验数据样例如图 5(b)所示,其中右侧单点波形对应红线标注位置。GPR采集频段、采集范围与场景类别见表 2。为了保证模型收敛而不过拟合,本文对数据进行了增容,增容后保证loss收敛于一个合适范围。表 3展示了专家解译的样本数量和数据增容后的样本数量。
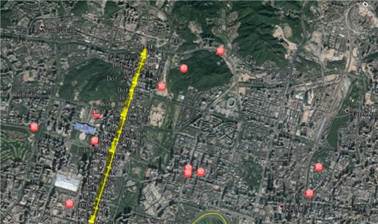
图 4 SIR-30车载雷达深圳市测试路段(谷歌地球)
Fig. 4 SIR-30 vehicle radar Shenzhen test section(Google Earth)
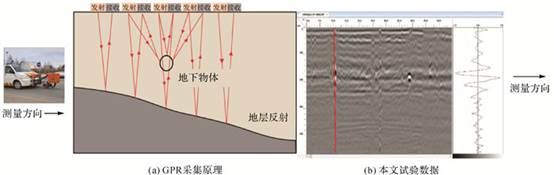
图 5 SIR-30车载雷达工作原理及样例
Fig. 5 Working principle and sample of SIR-30 vehicle-borne radar
表 2 GPR设备与试验测试区域
Tab. 2 GPR equipment and test area
仪器型号 |
天线中心频率/MHz |
地点 |
场景类别 |
采集长度/km |
扫描方式 |
SIR-30 |
400 |
深圳彩田右车道 |
城市 |
4.52 |
车载连续 |
SIR-30 |
400 |
深圳彩田左车道 |
城市 |
4.66 |
车载连续 |
表 3 扩容后不同类别样本统计
Tab. 3 Statistical quantitative table of samples of different categories after expansion
类别 |
数量 |
人工解译 |
增容后 |
雨水井 |
57 |
570 |
电缆 |
32 |
581 |
金属管 |
42 |
571 |
非金属管 |
17 |
246 |
稀疏钢筋网 |
87 |
264 |
致密钢筋网 |
92 |
307 |
空洞 |
162 |
494 |
总计 |
489 |
3033 |
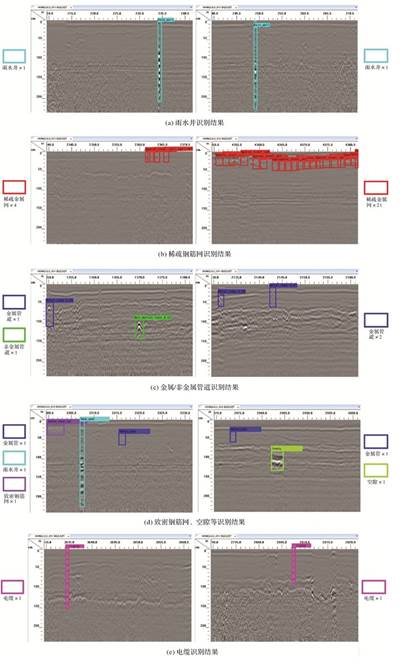
2.1 地下目标探测结果
本文的测试数据为SIR-30车载探地雷达系统以400 MHz频率获取的深圳市数据。图 6为训练后的神经网络识别GPR波形图像数据中雨水井、稀疏/密集钢筋网、桥梁、金属/非金属管道、电缆等目标的试验结果。深度学习预测结果表明,本文提出的方法能够根据GPR图像对地下目标的类型与位置进行准确的探测与定位。
点击获取原文