摘要
地面站激光雷达是森林资源调查和森林管理的重要手段。然而,单站的地面站激光点云的扫描范围是有限的,且存在遮挡,获取的点云数据不完整。有研究表明,在样地中心进行的单站的地面站激光点云采集时,由于存在遮挡,样地中10-32%的单木是难以扫描采样到的(Liang and Hyyppä, 2013)。因此,对多个单站的林区地面站点云数据进行配准是十分必要的。传统的配准方法通常采用人工靶标的方式。然而,靶标的设置耗时费力,尤其是当林区环境复杂时靶标的设置问题更为突出,影响数据采集的效率。因此,有必要研究林区地面站激光点云的自动化配准方法。
许多配准方法将树干作为配准的基元,配准方法通常包括三个步骤:首先从各个站中提取树干;再利用特征描述子评价树干之间的相似性,去除不相似的树干;最后利用保留下来的树干,估计最佳配准参数。通常将利用胸径,树的位置之间的距离等特征描述子对树干之间的相似性进行度量。目前的研究自动化配准方法获取的精度在1.2~16.1cm之间(Liang and Hyyppä 2013; Liu et al.,2017; Kelbe et al.,2016; Tremblay and Béland 2018)。地面站点云的配准的精度受到树干提取精度的影响,并且配准时间会随着树干的增加而急剧上升。然而,在缺少相邻两站的相对位姿关系时,很难减少用于配准的树干数量,快速地确定有效的树干。
本文提出了一种林区地面站点云的快速配准方法。该方法在保证配准精度的同时,提高了配准效率。该方法使用了两种关键点作为配准的基元,分别是从树冠提取的模点特征点,以及从树干提取的树的位置。与树的位置相比,模点特征点的数量较少,精度较低。首先,通过树冠点的点密度分析,利用mean shift算法从各个地面站中提取模点特征点。然后利用模点特征点作为配准基元进行配准,实现两站点云的粗配准。利用粗配准关系恢复两站的相对位姿关系,从而筛选出来自重叠区域的树的位置,利用筛选出来的树的位置的配准结果作为最后的两站点云的配准结果。本文提出的林区地面站点云快速配准流程如图1所示:
图1 基于树冠和树干关键点的林区地面站点云快速配准方法流程
本文的实验区域位于芬兰南部的一个针叶林(61.19°N, 25.11°E),主要树种有欧洲赤松(Scots pine),挪威云杉(Norway spruce)等。实验选取了10个样地进行林区地面站点云数据的配准研究,每个样地有5站,样地中心和东南、西南、西北、东北四个角落各一站。实验结果表明,本文提出的快速配准方法在10个样地获取的平均旋转偏差为2.09′,平移量偏差为7.45 cm. 利用基于树干的配准方法获取的平均旋转偏差和平移量偏差分别为1.94′和7.52 cm. 图2和图3展示了本文提出的配准方法(树干减少前)与基于树干的配准方法(树干减少后)在10个样地的配准旋转和平移偏差。本文提出的配准方法与基于树干的提取方法精度相当。
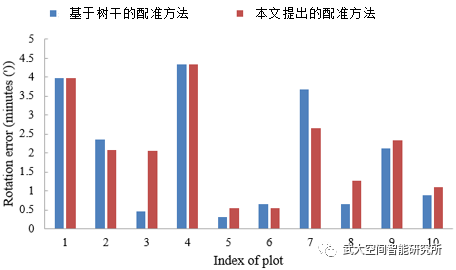
图2 基于树干的配准方(树干减少前)法与本文提出的配准方法(树干减少后)的配准旋转偏差比较 |
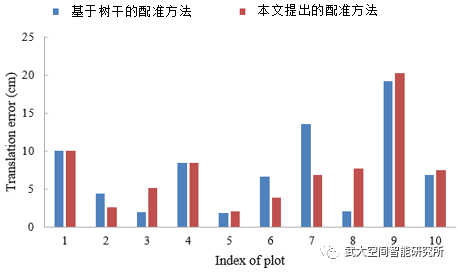
图3 基于树干的配准方(树干减少前)法与本文提出的配准方法(树干减少后)的配准平移偏差比较 |
本文提出的配准方法(树干减少前)与基于树干的配准方法(树干减少后)的时间比较如图4所示。本文提出的快速配准方法在10个样地的平均配准时间为96 s,基于树干的配准方法的平均配准时间为818 s。本文提出的配准方法在保证配准精度的同时,提高了配准效率。
图4 基于树干的配准方(树干减少前)法与本文提出的配准方法(树干减少后)的配准时间比较
Abstract
Registration of TLS data is an important prerequisite to overcome the limitations of occlusion. Most existing registration methods rely on stems to determine the transformation parameters. However, the complexity of the registration problem increases dramatically as the number of stems grows. It is tricky to reduce the stems and determine the valid ones that can provide reliable registration transformation without a knowledge of the two scans. This paper presents an automatic and fast registration of TLS point clouds in forest areas. It reduces stems by selecting from the overlap areas, which are recovered from the mode-based key points that are detected from crowns. The proposed method was tested in a managed forest in Finland, and was compared with the stem-based registration method without reducing stems. The experiments demonstrated that the mean rotation error was 2.09′, and the mean errors in horizontal and vertical translation were 1.13 cm and 7.21 cm, respectively. Compared with the stem-based method, the proposed method improves the registration efficiency significantly (818 s vs 96 s) and achieves similar results in terms of the mean registration errors (1.94′for rotation error, 0.83 cm and 7.38 cm for horizontal and vertical translation error, respectively).