标题:3D-CSTM: 三维连续时空建图方法
3D-CSTM: A 3D continuous spatio-temporal mapping method
作者:丛阳滋,陈驰*,杨必胜,李健平,吴唯同,李雨昊,杨俨棣
来源:ISPRS Journal of Photogrammetry and Remote Sensing
摘要:
低成本激光雷达三维建图能够快速、准确以及高效的完成场景点云地图的三维重建,具有高时效、高灵活、高精度的特点,但是由于低成本激光雷达数据采集视场受限,并且点云分布不均,大范围点云融合与配准仍然存在挑战。本文提出了一种基于激光雷达的大场景三维地图构建系统,通过提取场景中的结构化特征构建鲁棒的特征关联,利用误差向量椭圆解决激光退化问题,利用样条线模型对运动轨迹进行建模,以减小激光点云运动畸变对点云融合的影响,最终恢复场景时空连续的低冗余三维点云地图。
本文所提出的系统如图1所示,定位模块可以实现快速的运动估计,建图模块完成对三维场景的高精度建图。
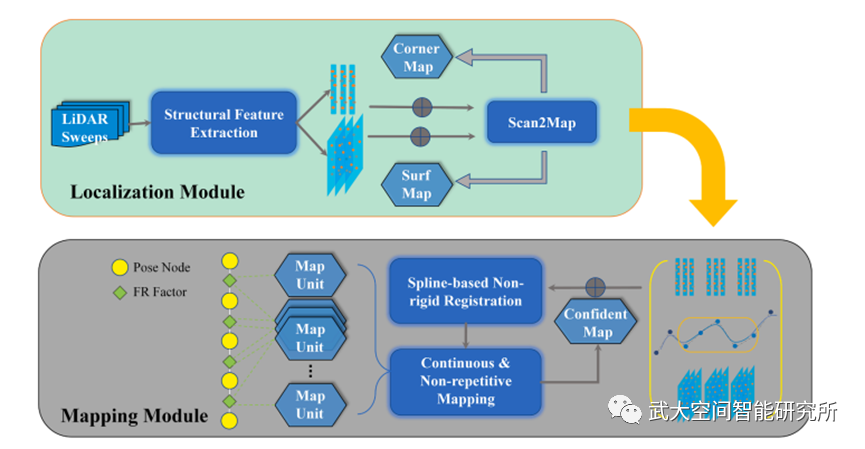
图1. 系统流程图
我们通过将生成的三维点云地图与具有更高精度的TLS以及车载MLS点云数据进行比较,结果如图2所示,可以看出本系统所构建的点云地图具有更高的精度以及时空连续性。
Abstract:
3D mapping is now essential for urban infrastructure resource monitoring, autonomous driving, and the fulfillment of digital earth. LiDAR-based Simultaneous Localization And Mapping (SLAM) technology has been widely studied because of its efficient application in the reconstruction of the 3D environments that benefitted from its sensor characteristic. However, the sparsity of low cost LiDAR (Light Detection And Ranging) sensor provides great challenge for it. Insufficient or poor distribution of the constraints as well as the motion distortion in one scan of point cloud would deteriorate the pose estimation in SLAM. In this paper, a novel 3D mapping method based only on the LiDAR data is proposed to enhance the performance of SLAM-based 3D point clouds map reconstruction. The proposed system consists of two main modules: localization module for rapid egomotion estimation within the surrounding environment, and mapping module for accurate point clouds fusion. As for the localization, scan-to-map point cloud registration scheme are adopted where structural features are firstly extracted to provide valid correspondences. What’s more, an effective method is figured out to balance the cost factors for the optimization function of pose estimation in the process. This further handles the degenerated cases for cloud registration. Focusing on improving the quality of the map, a spline motion model is integrated with non-rigid point cloud fusion to facilitate the continuous and nonrepetitive mapping of the environment. Extensive experiments are carried out for the verification of our system including large-scale outdoor and long-corridor scenes. According to the experimental results, our system has achieved 0.78‰ closure error and 27.5% improvement in the APE (Absolute Pose Errors), outperforming the state-of-the-art LiDAR-based SLAM (e.g. LeGO-LOAM) frameworks in our test sites. To specifically verify the performance of 3D mapping, the precision of 3D points is quantified through comparing with the high-precision point cloud maps collected by MLS (Mobile Laser Scanning) and TLS (Terrestrial Laser Scanning). The RMS of point-to-plane distances have improved 20% based on the fitted Weibull distribution. In addition, some ablation tests are conducted to reveal the efficacy of different components in our system.