原文题目:Satellite visibility analysis considering signal attenuation by trees using airborne laser scanning point cloud
作者:寇瑞雄,谭仁春,王诗云,杨必胜*,董震,杨树文,梁福逊
DOI: https://doi.org/10.1007/s10291-023-01404-w
研究背景:
全球导航卫星系统(GNSS)卫星可见数是评价GNSS定位精度的重要指标。在城市区域,建筑物和树木对卫星信号造成严重阻碍和衰减,使GNSS定位精度存在极大不确定性。探究城市空间GNSS可见性及其对“城市峡谷”区域各种设备导航定位的影响具有重要意义。已有研究使用三维(3D)城市模型或二维全景影像计算某些地区特定时刻的卫星可见性。但是,高精度3D城市模型的生产依然需要消耗大量人力和昂贵费用,使用全景影像则难以支持3D分析。此外,现有研究很少考虑城市树木对GNSS信号的遮挡和衰减。因此,在高精度计算城市立体空间导航卫星可见性时,如何同时考虑建筑物和树木对GNSS信号的影响,并顾及GNSS信号经过树木时信号强度的变化规律,是亟待解决的科学问题。
研究方法:
本文提出了一种以机载点云为数据基础,同时考虑树木和建筑物影响的城市立体空间GNSS卫星可见性计算方法。首先建立了顾及树木影响的GNSS信号全路径传播模型,然后分别提出了针对建筑物和树木点云的卫星可见性计算方法,以及基于机载点云的卫星可见性快速计算方法。最后使用兰州交通大学南校区机载激光扫描点云数据,结合GNSS不同星历和动态实测的GNSS数据,验证本文方法并绘制城市立体空间导航卫星时空可见图。本文的关键技术流程如图1所示:
图1 论文方法关键步骤示意图
精度验证:
为了验证本文所提方法的有效性,我们使用GNSS接收机采集动态数据,对实验进行定量评价,评价指标包括准确率(P)、召回率(TPR)和F1值。实验结果表明,同时考虑建筑物和树木比仅建筑物遮挡下的卫星可见性计算准确率明显提升,其中Galileo系统的精度提高了17.1%,四大GNSS系统的精度整体提升了16.0%。实验结果证明了本文提出方法的有效性。
研究结果:
利用GNSS广播星历和TLE数据,使用兰州交通大学机载激光扫描点云,分别计算GNSS四大系统的卫星可见数(图2),绘制不同高度和不同时刻的导航卫星可见图,包括实时GNSS卫星可见图(图3)和预报GNSS卫星可见图(图4)。
图2 不同导航系统的实时卫星可见图(左上:BDS,右上:GPS,左下:Galileo,右下:GLONASS)

图3 不同高度层的实时GNSS卫星可见图(从a ~ f子图分别表示距离地面1 m, 7 m, 15 m, 25 m, 45 m和 75 m的卫星可见图)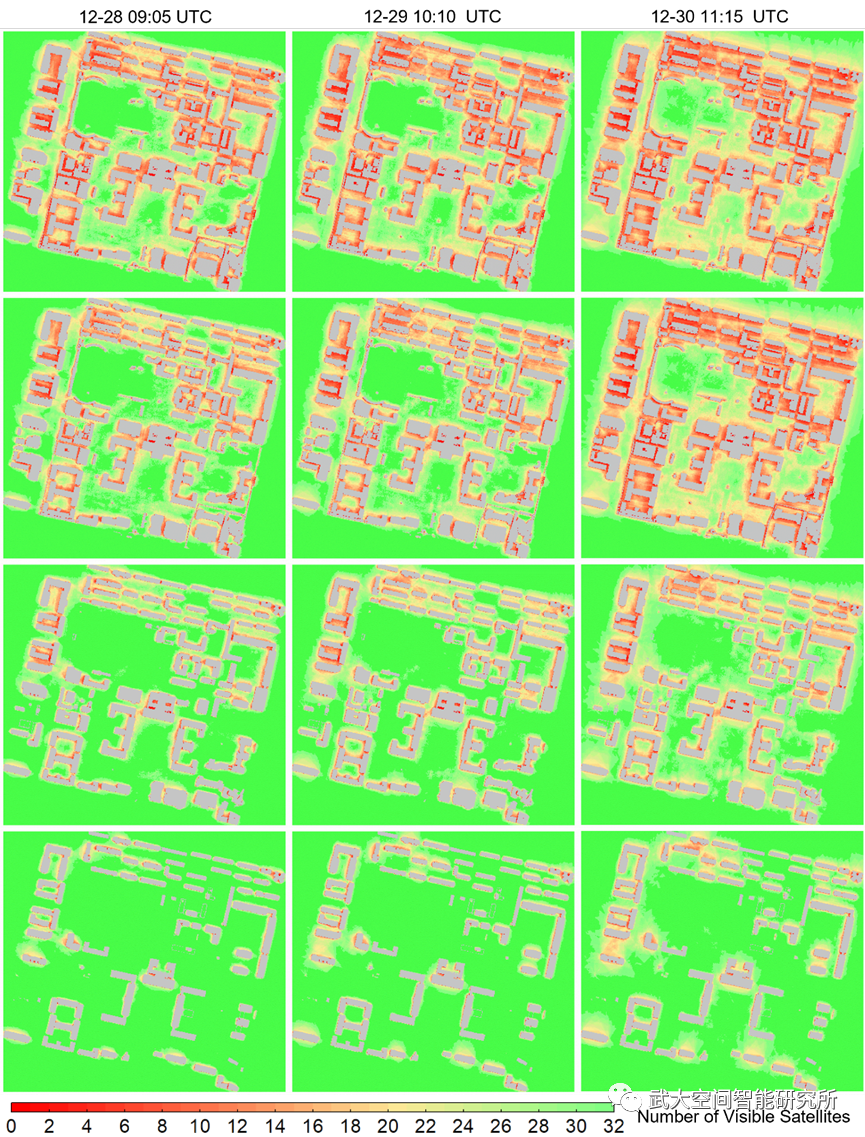
图4 不同时刻不同高度的预报GNSS卫星可见图
从图2到图4可得,不同导航系统在同地区同一时刻的卫星可见性存在较大差异。随着高度的逐渐增高,城市导航卫星可见数不断增多,同一地区不同时刻的可见卫星数有明显变化。
本文为城市立体空间导航卫星时空可见图的绘制提供了一种简便、高精度的解决方案,可为无人驾驶导航、无人机航迹规划等城市复杂环境中GNSS应用提供重要参考。
Abstract:
The number of visible global navigation satellite system (GNSS) satellites is an important indicator for evaluating positioning accuracy. In urban areas, buildings and trees cause serious satellite signal obstruction and attenuation. Studies have used three-dimensional (3D) city models or 2D panoramic imagery to calculate the visibility of satellites in some areas at a certain time. However, the production of accurate 3D models involves heavy manual work and is expensive, while public panoramic imagery mainly spreads over roads and cannot support 3D analysis. Also, the existing studies seldom consider the impact of urban on satellite signals. We thus propose a method that considers the influence of both trees and buildings. A full-path propagation model for GNSS signals is established. Then a fast visibility analysis of satellites using an airborne laser scanning (ALS) point cloud is performed. Hence, the number of visible satellites at a specific time can be mapped. In addition, real-time and forecast visibility maps are generated according to the GNSS ephemeris. To verify the effectiveness of the proposed method, we collected field measurement data for qualitative and quantitative evaluation of experiments. The experiments demonstrated that the proposed method provides an easy-to-use and high-precision solution to map the spatio-temporal visibility of satellites in 3D urban space, which serves as an important reference for applications like unmanned aerial vehicles (UAV) route planning.