原文题目:AFLI-Calib: Robust LiDAR-IMU extrinsic self-calibration based on adaptive frame length LiDAR odometry
作者:吴唯同,李健平,陈驰*,杨必胜*,邹响红,杨俨棣,徐宇航,钟若飞,陈瑞波
来源:ISPRS Journal of Photogrammetry and Remote SensingDOI: https://doi.org/10.1016/j.isprsjprs.2023.04.004
研究背景:
便携式激光扫描系统(手持、背包、头戴式)可以灵活快速地获取点云,有效弥补了传统激光扫描系统的不足。精准的激光雷达与惯性测量单元外参标定是激光扫描系统获得高质量点云的前提。在过去的二十年里,使用GNSS、高精度标定场或者标定板的传统标定方法被大量提出。相比之下,自标定方法不需要额外的传感器或者标定板等,在实地测量中更加灵活。然而,由于快速运动导致的单帧点云运动畸变和IMU积分的位置误差快速漂移给激光雷达与惯性测量单元外参自标定带来挑战。与此同时,现有的激光雷达里程计方法没有很好地考虑便携式设备的高动态运动模式和场景结构的变化。针对上述问题,本文提出了基于可变帧长度激光里程计(以下简称为变帧激光里程计)的激光雷达与惯性测量单元外参自标定方法,如图1所示。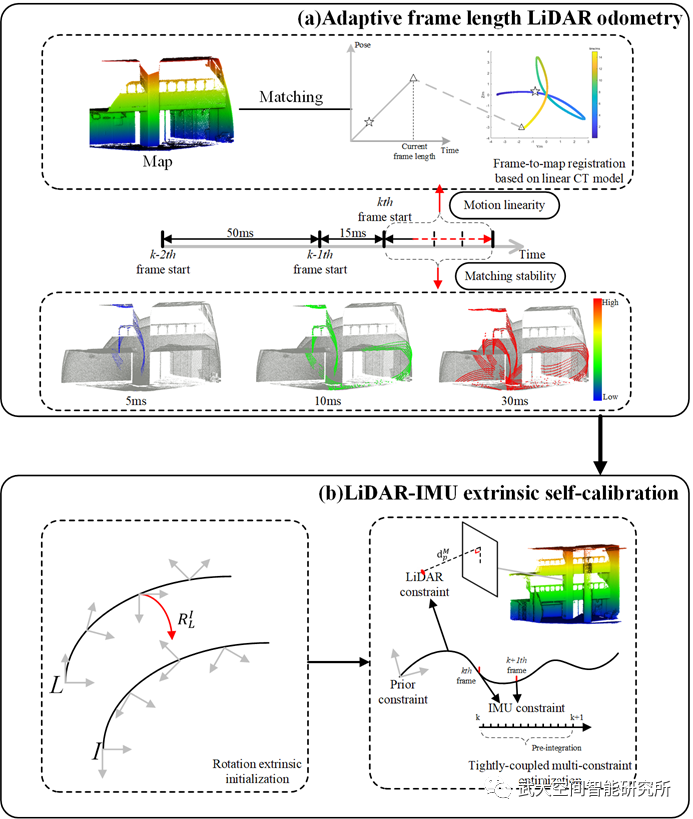
图1 方法概述。方法输入为时间同步的激光雷达与惯性测量单元序列数据(运动激励充分),输出为6自由度的外参和高精度点云。方法分为两部分:(a)变帧激光里程计模块;(b)外参自标定模块,分为旋转外参初始化与紧耦合多约束优化两部分。
研究方法:
本文的贡献包括提出了一种全新的变帧激光里程计框架,基于线性的连续时间模型用于激光帧到地图的配准和精准鲁棒的激光雷达-惯性测量单元外参自标定方法。首先,使用如图2所示的变帧激光里程计得到激光雷达的位姿。在这个过程中,通过提出的匹配稳定性检查和运动线性检查,对激光帧的长度进行自适应的调整。随后,根据计算得到的激光姿态序列和IMU数据,进行旋转外参的初始化。最后,算法紧耦合IMU预积分约束、激光点到面约束和先验约束,进一步优化系统状态量(包括位置、姿态、速度、IMU偏置)和外参。
图2 变帧激光里程计流程图
研究结果:
方法使用头戴式激光扫描系统WHU-Helmet在室内和室外场景以及不同运动模式的标定数据上进行了充分验证。实验表明,在测试数据上,该方法的平移参数精度为0.041 m,比SOTA方法提升56.3%。外参的标准差显著降低(如表1所示):平移的标准差(0.017 m、0.024 m、0.022 m)和旋转的标准差(0.17°, 0.25°, 0.15°), 验证了我们方法的鲁棒性。解算得到的点云到高精度地面激光扫描系统VZ-400扫描点云的距离均方根误差为0.042 m(表2),显示出了高精度的标定结果。与固定帧长度的激光里程计方法和经典的“先改正后配准”运动畸变改正模型的对比实验进一步验证了所提出的变帧激光里程计的优越性和有效性(见表3和表4)。图3展示了算法得到的室内外高精度点云结果。

表2 解算点云到高精度地面激光扫描点云距离的均方根误差结果


表4 与传统基于匀速模型的 “先改正后配准”方法的对比结果

图3 使用WHU-Helmet自采集数据得到的高精度点云结果
Abstract:
As an effective complement to common laser scanning systems, the portable laser scanning system can acquire point clouds flexibly and quickly. Calibration between Light detection and ranging (LiDAR) sensors and inertial measurement units (IMU) is the prerequisite for laser scanning systems to obtain high-quality point clouds. Related methods have been proposed in the last two decades, where the global navigation satellite system (GNSS) or high-precision calibration fields are commonly used. However, the extrinsic self-calibration of LiDAR-IMU is challenging, due to the large distortion in single-frame point cloud caused by rapid motion and the position errors of IMU integration which drift quickly. At the same time, the highly dynamic motion patterns of portable devices and the changes in the scanned scene structure are not well considered in existing LiDAR odometry methods. To take better advantage of the characteristics of non-repetitive scanning LiDAR sensor, this paper proposes AFLI-Calib, which utilizes adaptive frame length LiDAR odometry to perform the extrinsic self-calibration of LiDAR-IMU. Unlike LiDAR odometry methods with a fixed frame length, the LiDAR frame length is dynamically adjusted according to the motion state of sensors and the matching stability of scenes. The single-frame point cloud is registered to the map through a linear-based continuous-time model, eliminating the motion distortion correction in advance. For further optimization of trajectory and extrinsic parameters, IMU raw measurements and LiDAR observations are involved in the multi-constraint optimization, through tightly-coupled IMU pre-integration constraints, LiDAR point-to-plane constraints, and prior constraints. The method is fully validated using self-collected calibration data of indoor and outdoor scenes and different motion modes. Experiments show that on the test data, the translation parameter accuracy of the method is 0.041 m, which is 56.3% higher than the state-of-the-art method. The standard deviation is significantly reduced, with translation deviation (0.017 m, 0.024 m, 0.022 m) and rotation deviation (0.17°, 0.25°, 0.15°), which verifies the robustness of our method. The average RMSE of distances to the reference point cloud acquired by the terrestrial laser scanning system (TLS) is 0.042 m, showing a high accuracy calibration result. Comparative experiments with the fixed frame length LiDAR odometry method and classical “correction-then-registration” motion distortion model further verify the superiority and effectiveness of the proposed adaptive frame length LiDAR odometry.
https://www.sciencedirect.com/science/article/pii/S092427162300093X