祝贺课题组成员博士研究生田茂同学1篇论文被ISPRS Journal (IF: 6.942)接收.
该论文提出了一种高效、鲁棒的层次PatchMatch深度计算方法,克服了传统立体匹配方法平行平面(fronto-parallel)影响,提高了传统匹配方法的精度和效率,可广泛应用于城市场景三维重建、自动驾驶及机器人导航。
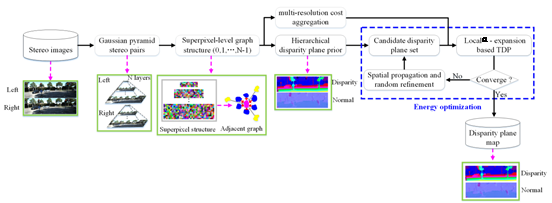
Fig. 1 The workflow of HPM-TDP.

Fig. 2. Comparison of the disparity maps of the KITTI 2015 dataset.
Mao Tian, Bisheng Yang*, Chi Chen*, Ronggang Huang, and Liang Huo. “HPM-TDP: An Efficient Hierarchical PatchMatch Depth Estimation Approach using Tree Dynamic Programming ”, ISPRS Journal of Photogrammetry and Remote Sensing (Accepted), Jun. 2019.

