8月18日,国家自然科学基金委员会公布了2021年度国家自然科学基金项目评审结果,空间智能研究所老师获得1项重点项目,3项面上项目和1项青年基金资助。杨必胜教授的“城市立体形态结构化建模理论方法”获地学部重点项目资助,陈亮教授的“基于测距测角及自适应融合的5G室内定位方法研究”、涂志刚研究员的“面向视频人体动作识别的时空运动信息研究”、董震副研究员 “面向数字孪生道路的场景理解与三维基底构建”分别获面上项目资助,朱宁宁博士后 “基于场景感知的车载全景图像序列与激光点云融合方法”获青年科学基金资助。此外,杨必胜教授指导毕业的博士南京信息工程大学臧玉府副教授、中国科学院黄荣刚副研究员分和中国地质大学(武汉)代文霞副研究员分别获面上项目资助与青年科学基金项目资助。
“城市立体形态结构化建模理论方法”重点基金项目介绍
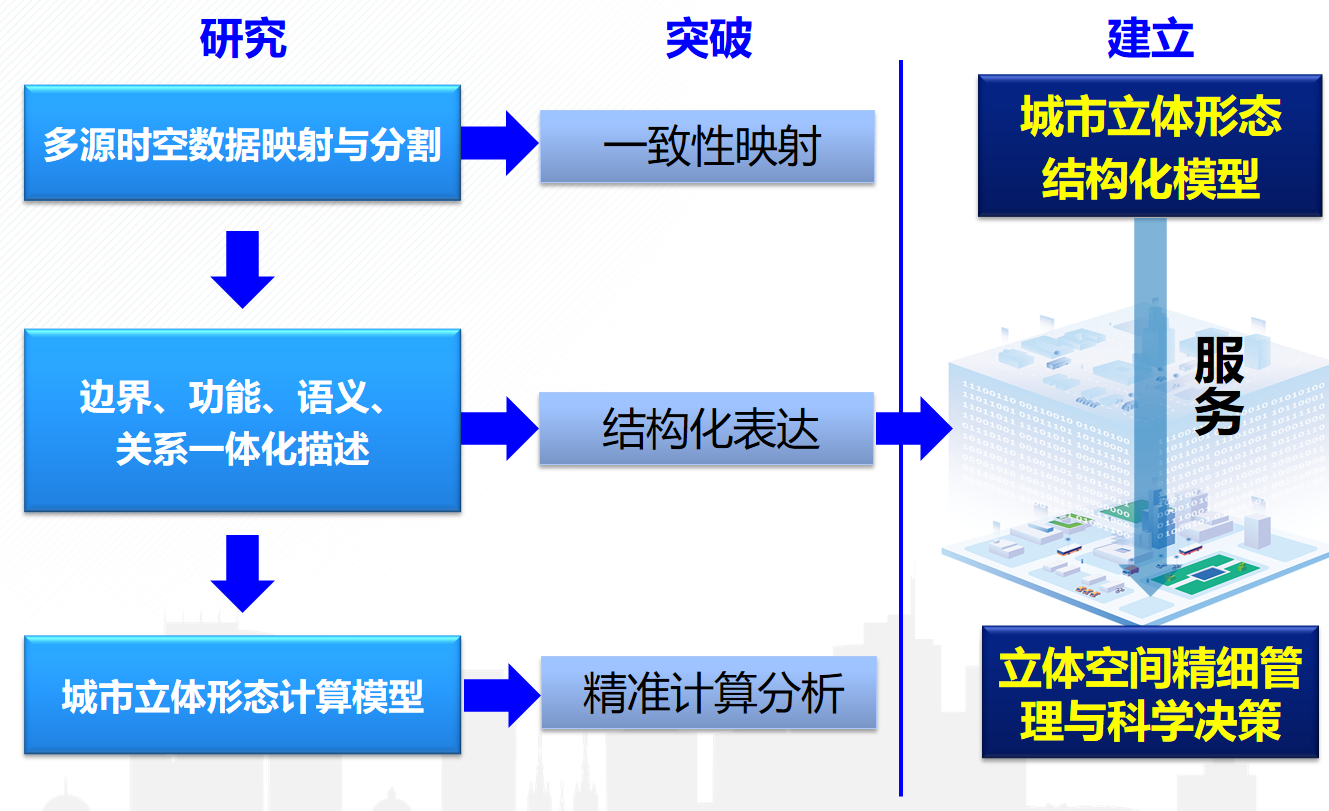
随着新型城镇化建设、智慧城市等战略的实施,城市向纵深方向快速扩张,以二维平面为主的城市形态描述,无法精确刻画城市立体形态的功能结构及其对资源科学利用等方面的影响。精准刻画城市立体空间的功能与结构是城市可持续发展、热岛、“双碳”目标等重大需求不可或缺的支撑。城市资源的科学开发利用、风场的计算、清洁能源评估等无一不对城市立体要素的准确刻画提出了迫切需求。三维城市模型是刻画城市立体空间的重要数据基础。当前,基于倾斜摄影等为主的三维城市Mesh模型缺少空间单元的结构与语义描述,难以有效支撑复杂的计算分析,服务能力严重不足;而以人工建模为主的精细化模型强调视觉效果,但制作成本高、劳动强度大,无法满足大规模建模需求。如何构建结构化的城市立体形态模型成为当前地理信息科学与遥感研究面临的难题。
城市立体形态结构化建模理论方法的核心内容
本项目针对如何突破城市立体形态模型从可视化到可计算的科学问题,重点突破城市立体形态结构化建模面临的多源时空数据结构与语义一致性映射、立体形态结构化表达和立体形态模型计算分析三大难题,构建多层次(如:功能区、单体等)城市立体形态的知识图谱,建立城市立体形态结构化建模理论方法,为城市时空智能决策提供科学依据。该科学问题的有效解决一方面将有力促进地理信息与遥感科学的理论方法发展,另一方面对城市改造、空间布局优化、智慧城市服务、城市节能减排与可持续发展等亦具有十分重要的作用和意义。
“基于测距测角及自适应融合的5G室内定位方法研究”面上项目介绍
针对室内环境复杂多变、智能终端资源有限的高可用定位难题,利用大规模商用的5G信号,深入分析信号特征和传输特点,在不改变智能终端单天线接收条件下,开展面向大众用户的5G室内定位方法和理论研究,并开发定位接收机原型进行实测验证。项目拟从测距测角及自适应融合定位三方面探索关键技术,形成一套完整的5G单基站定位理论,研究将为解决室内复杂环境下的单基站定位难题提供创新思路,为实现准确、实时、高可用的泛在室内定位提供坚实的理论支撑,有效提高智能终端泛在导航自主定位能力,推动5G产业化发展和智能化应用,具有重要科学意义和社会应用价值。
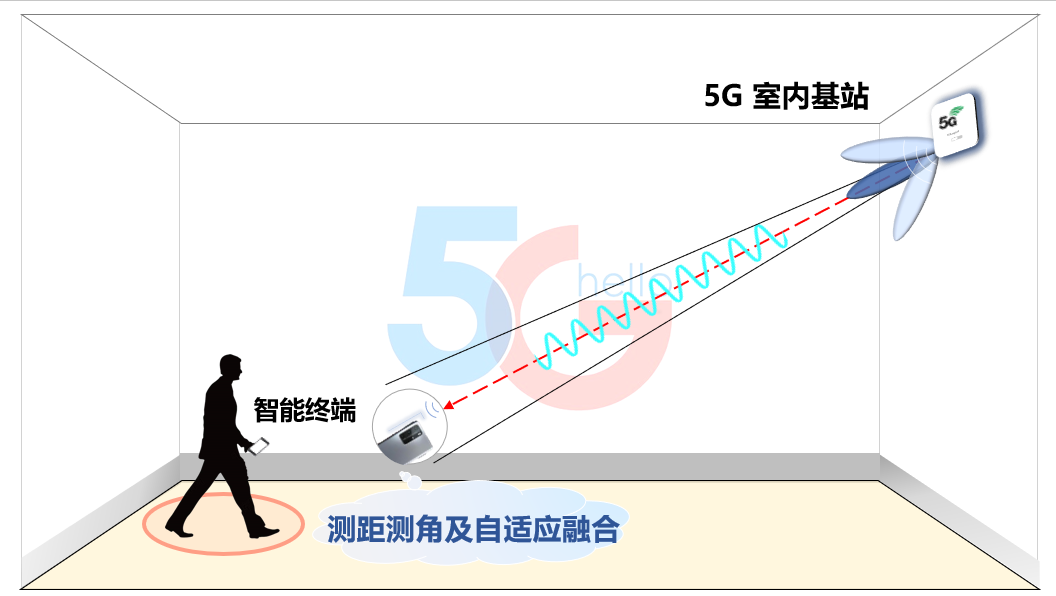
基于测距测角及自适应融合的5G室内定位
“面向视频人体动作识别的时空运动信息研究”面上项目简介
本项目所开展的“面向视频人体动作识别的时空运动信息研究”,以时序运动信息为着力点,从机器学习与计算机视觉技术的本质出发,突破运动信息获取、运动特征学习、时空特征表示方面的瓶颈问题,创建一个具备①“运动信息”无监督交互式“计算”、②“运动特征”高效充分“学习”、③“时空特征”视频级长时序“表达”的通用性模型,实现提高视频人体动作识别技术在复杂现实场景中实用性的目的。为复杂场景下视频人体行为分析视觉任务提供新的思路与技术支撑,推动视频人体动作识别方法体系的发展与完善,加速视频人体动作识别的应用进程,对视频大数据智能解析具有重要的理论研究意义与实际应用价值。项目研究成果将服务于智慧城市、新型基础设施建设、大数据、人工智能等国家重大发展战略。

基于“时空运动信息”的视频人体动作识别
“面向数字孪生道路的场景理解与三维基底构建”面上项目介绍
数字孪生道路旨在网络虚拟空间对现实世界的人、车、路等全要素进行实时数字化和可视化,既包含静态道路基础设施三维重建(如,位置信息、语义信息和拓扑信息),又包含动态实时交通信息(如,人、车、非机动车的状态、速度、方向、位置等)精准映射,需要综合利用多源、多平台传感器进行数据采集。目前数字孪生道路建设整体处于初期探索阶段,存在数据采集门槛高、复杂道路场景理解难、三维基底重建精细度低、交通状态精准映射难等关键技术“卡脖子”问题。针对以上技术瓶颈,提出“跨模态数据高精度融合→多任务融合道路场景理解→全要素三维基底构建与态势感知→实验验证”的研究思路,整体技术路线如图1。本项目预期构建三维立体、全域覆盖、动静结合的数字孪生道路模型,服务于“两新一重”建设和交通强国战略。
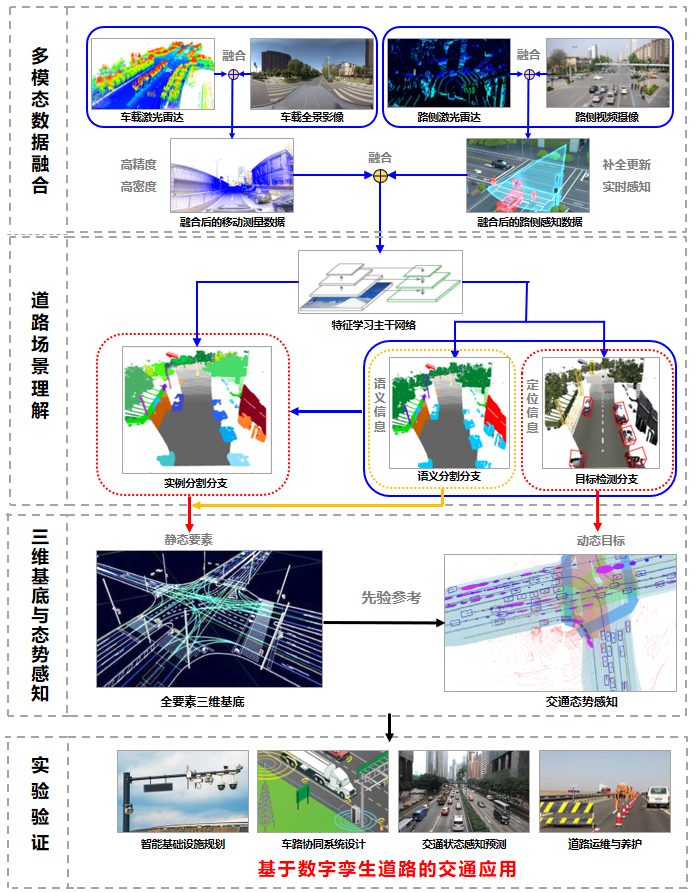
数字孪生道路建设总体技术路线
“基于场景感知的车载全景图像序列与激光点云融合方法”青年项目介绍
在无人驾驶和智慧城市构建等领域中,激光点云和全景图像已得到广泛应用。相机和LiDAR已是大多数无人驾驶车必备的传感器,且在众多为无人驾驶赋能的技术单元中,高精度地图是至关重要的一环,点云和图像是获取高精度地图的重要手段。将全景图像与激光点云数据融合,实现两类数据在空间和纹理信息方面的优势互补,不仅可用于点云渲染,场景分类等测绘制图领域,在无人驾驶等领域中也将发挥重要作用。全景图像拼接、全景图像-激光点云配准是多源数据融合的关键技术,同时也是相关应用的基础。但是,多镜头拼接获取的全景图像不满足严格的成像模型,不同场景包含的地物特征具有很大差异,给全景图像序列与激光点云的高精度融合带来巨大挑战。针对上述瓶颈问题,本项目以车载全景图像序列和激光点云为数据源,以实现全景图像拼接误差的一致性校正、不同场景全景图像序列与激光点云的自动配准为研究目标,项目的总体技术路线如图2所示。本项目有望保证全景图像序列与激光点云的融合在精度、适用性、鲁棒性和自动化水平等方面满足实用要求,服务于无人驾驶、虚拟现实、智慧城市构建等重大应用需求。
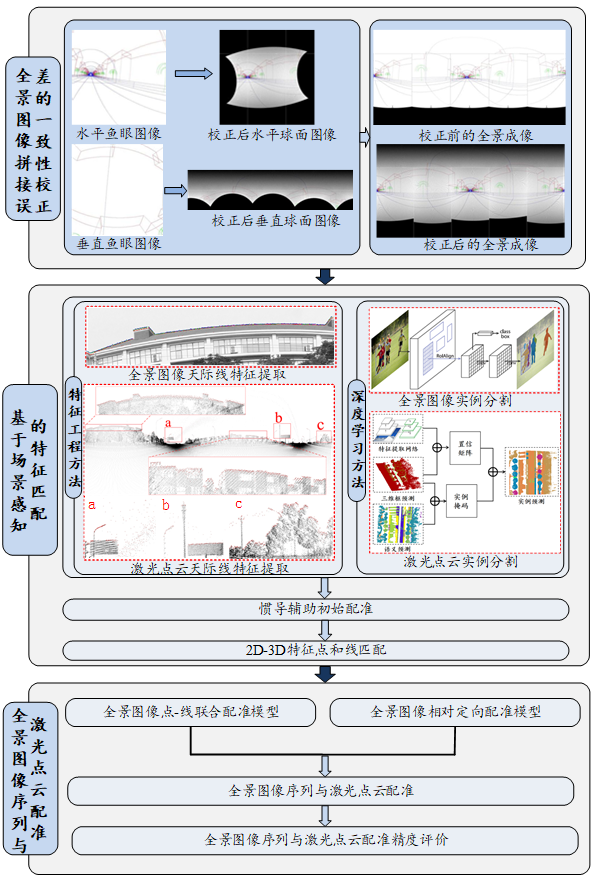
车载全景图像序列与激光点云融合

